- ベストアンサー
動くロボットに正三角形を書かせるプログラムでは回転
動くロボットに正三角形を書かせるプログラムでは回転時に60度回転させる命令処理だと正三角形を描かないそうです。 120度回転命令処理すると正三角形をかけるそうです。 なぜ60度回転だと正三角形が書けないのですか?

- auhuaweinova2
- お礼率32% (594/1842)
- その他(プログラミング・開発)
- 回答数7
- ありがとう数1
- みんなの回答 (7)
- 専門家の回答
質問者が選んだベストアンサー
多分ロボットに「後進」が実装されてないから。
その他の回答 (6)

- HohoPapa
- ベストアンサー率65% (454/691)
「動くロボット」が ・止まる ・方向を変える ・進む これらを 一連の1つの命令としてしか理解できないロボットなら (1)進む (2)止まる、120度方向を変える、進む (3)止まる、120度方向を変える、進む という命令をすることとなりますね。 他方 ・止まる ・方向を変える ・進む これらをそれぞれ独立して命令できるなら (1)進む (2)止まる (3)60度方向を変える (4)60度方向を変える (5)進む (6)止まる (7)60度方向を変える (8)60度方向を変える (9)進む という命令ができますね。 ロボットの機能次第というになりましょう。
- hiodraiu
- ベストアンサー率15% (448/2823)
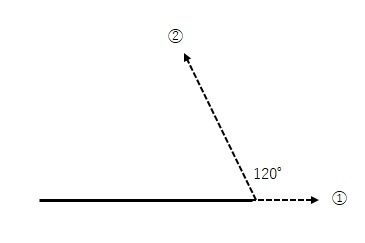
実際に自分で歩いて考えてみたら分かりやすいのでは? 正面に向かって歩くことが0度とするなら、60度の回転では斜め前方向になりますよね。これだと内角が120度になりますよね。正三角形を書くには内角が60度である必要がありますから、これでは正三角形にはなりませんよね。
- AsarKingChang
- ベストアンサー率46% (3467/7472)
すいませんが・・・ 円の内側は360度ですから、 3角形=これを3で割る=360÷3=120で、 普通に120以外はないと思います。 なので、四角を内円に対して書くなら 360÷4ですので、答えももちろん90度です。 正四角形の角は90度なのは、どうしても変えられないですよ。 三角形だとしても同じ。 どうしてもというなら、正四角形を90度以外で 書く方法を見つければ何とかなる(数学的には) しかし、無理だとおもいます!
何を言われてるんだか。という内容ですが。 進行方向に対して何度曲がるのかということなんだから、非常に簡単な話でしょうに。 小学生でも、算数の図形を習えばわかると思いますが。。。

動くロボットに正三角形を書かせるプログラムでは回転時に60度回転させる命令処理だと正三角形を描かないそうです そんな事実はありません
- maiko04
- ベストアンサー率17% (345/1956)
やってみてください。 左から右方向に線を書き、 <進行方向向いて>60度回転すると右上の方を向きます。
関連するQ&A
- プログラム ロボット
海外の職業訓練学校でシステムエンジニアとしてボランティア活動をしています。 電気科教師と共同でプログラムロボットを作成しようという話が あるのですがこちらの国ではKITを売っていないので日本で 入手しようと考えています。 http://www.japan-robotech.com/product/set.html このような感じのプログラム可能なロボット作成KITが他にも 無いでしょうか? 出来るだけ安価で、またPICを使用したものが有ればと思っています。 よろしくお願いします。
- 締切済み
- その他([技術者向] コンピューター)
- 立方体をくるくる回転させるプログラム。。。
はじめまして。 よろしくお願いします。 今作ろうとしているプログラムは、 ・実行したらメニュー画面がでる。 メニューは「回転」「終了」の二つ。 回転を押すと、5度ずつ回転する。 終了を押すと、メニュー画面が消える。 ・回転させるものは立方体。 一辺の長さは100です。 実行した時に、メニュー画面と同時に立方体もでる。 メニュー画面のみならできています。 助けてください。。。。
- 締切済み
- C・C++・C#
- インパクトドライバの正回転逆回転の速さが違う
マキタのインパクトドライバ TD136DRFXを使っているのですが、正回転と逆回転の回転の速さが違います。最大に回してもゆっくり回しても違います。正回転のほうが遅いです。買ったばかりの新品です。原因はなんでしょうか?
- ベストアンサー
- DIY(日曜大工)
- ロボット制御の不思議。
ロボット制御の不思議。 なぜ60度回転制御させるよりより大きく動く120度回転の方が動作誤差が少なくなるのですか? 動く時間が長い方が挙動誤差が小さくなるロボット工学のギア?歯車の理屈が分かりません。
- ベストアンサー
- その他(プログラミング・開発)
- Cで回転プログラムの高速化を
Cで、90枚の画像を、それぞれ0度から90度まで回転させるプログラムを作りました。 回転の処理は重く時間がかかるため、 それぞれの角度の回転後の位置を配列に格納して、 その値を参照して画像を回転させていこうと思ったのですが、 例えば、画像が300*300としたら回転座標を入れる配列は2次元で2つとりますよね? kaitenX[90][300] kaitenY[90][300] これで、例えば元画像を50度回転させる時のx,y座標が10,50の所の回転後の座標は kaitenX[50][10]の値(回転後のx座標の値) と kaitenY[50][50]の値(回転後のY座標の値)を 参照さしてやればいいと思うのですが、 このとき、回転後の画像をtemp[300][300]という回転後の出力用配列に 代入していくとき、 どうやって代入していけばよいでしょうか? まさか、 for(r=0;r<90;r++) //rは角度情報 for(i=0;i<300;i++) for(j=0;j<300;j++) { temp[i][j] = Gengazo[r][kaitenx[r][j]][kaiteny[r][i]] } なんて風には書けませんよね^^;(自分で一応試したけどダメでした) 回転後の座標を格納するまでは出来ると思うのですが、 格納後、どうやってその値を参照させて、格納させていけばいいか わかりません。 教えていただけませんでしょうか? また、もっと高速化できる効率の良い方法があれば教えて下さい。
- ベストアンサー
- C・C++・C#
- 正三角形の頂点の座標を求めるプログラムについて
先日、C++言語を使った学校の授業の課題で次のような問題が出されました。 「ある正三角形の2点の頂点の座標を入力し、残り1点の頂点の座標を計算するプログラムを作成しなさい。ただし、正三角形の3辺が同じ長さであるという特性を用いて作成しなさい。座標の有効桁数は小数点以下3桁とする。」 僕は最初、回転行列を用いて計算を行うプログラムを作成して提出したのですが、再提出をくらいました。どうやら、回転行列や方程式は使ってはいけないようです。 それならば、一体どのようなコードを作成すればよいのでしょう?皆さんの力を貸して下さい。
- 締切済み
- C・C++・C#
- 【javaアプレット】スクロールバーを動かすとその場で正三角形を回転させたい
スクロールーバーを移動させると、表示している正三角形がその場で回転するプログラムを作りたいのですが、まったくわかりません・・・。 正三角形を作る座標は既にできてます。cos、sinを使うやつですよね? でも、スクロールバーの値を読み取って、どうやって回転するように座標に組み込むかがわかりません。 知恵を貸してくださいm(__)mお願いします。
- 締切済み
- Java
- 産業用ロボットについて
DENSOロボットの出力について質問です。 ロボット運転中とはどのようなことですか? 取説にはロボットが運転中(プログラム実行中)と表記されているのですが、詳しく知りたいです。(ロボット運転中になる条件又は、命令文など) 自分の想像なんですが、ロボットが原点の位置から動いた瞬間にロボット運転中が入るってことでしょうか? もしも、そうてあればP10が原点だとして、P10→P11→P12→P13→P14→P10で1サイクル終了するとします。そうするとP10からP11に動いた時点でロボット運転中がONし、P10まで戻りロボット運転中がOFFになる。違うモードでP10→P11→P14→P10→P13→P12→P10となる場合は、途中でP10(原点)に戻ったらその瞬間だけロボット運転中はOFFになるってことですか? 全然仕組みがちがかったら教えてください。宜しくお願いします。
- 締切済み
- SE・インフラ・Webエンジニア
- ロボット検索プログラムについて
ホームページを開設しようと思っています。 目的は遠方にいる両親などが子供の成長を見ることができるように、写真と簡単な日記を中心としたものです。 なので多くの人に見てもらおうとは全く考えていないのですが、登録しなくてもロボット検索プログラムで登録されてしまうことがあるようです。 これを防ぐにはどうしたらよいのでしょうか? 登録されにくくなる方法等がありましたら教えてほしいと思います。 よろしくお願いします。
- ベストアンサー
- その他(インターネット・Webサービス)

お礼
みんなありがとう なるほど