スカラーロボットの選定に悩む
- スカラーロボットの選定について悩んでいます。カタログには許容トルク、許容モーメント、許容慣性モーメント等の記載がありますが、どう選定して良いのか悩んでいます。
- スカラーロボットの選定について、メーカーに問い合わせたものの担当者毎に回答が違い、判断がつかない状況です。アドバイスを頂けると助かります。
- 4軸スカラーロボットを使って電気ドライバーの取り付けを行いたいが、トルクやモーメントについての適切な選定が難しいです。
- 締切済み
スカラーロボットの選定について悩んでいます
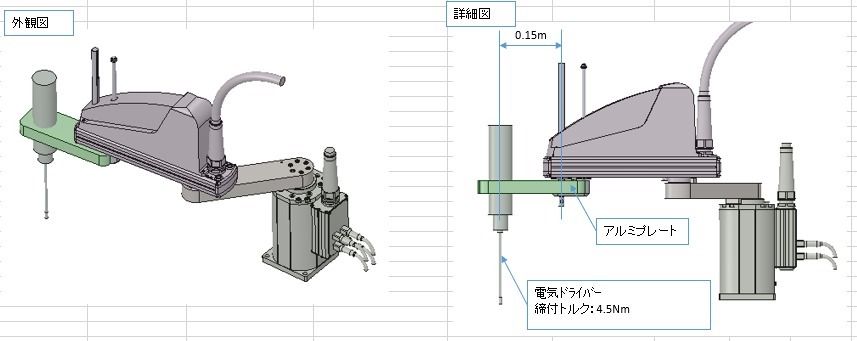
4軸スカラーロボットの選定について悩んでいます。 添付画像(スカラーロボットの外観図)ロボットと電気ドライバーを固定します。 添付画像(詳細図)電気ドライバーでネジ締めトルク4.5Nmで締めると30Nの力がスカラーロボットの軸にかかると思われます。 カタログには許容トルク、許容モーメント、許容慣性モーメント等の記載がありますが、どう選定して良いのか悩んでおります。 メーカーに問い合わせしてみましたが、担当者毎に回答が違うのでスッキリと判断がついておりません。 どなたかアドバイスを頂ければ助かります。 よろしくお願いいたします。

- kengoohuchi
- お礼率25% (1/4)
- その他(ロボット)
- 回答数4
- ありがとう数6
- みんなの回答 (4)
- 専門家の回答
みんなの回答
- lumiheart
- ベストアンサー率48% (1103/2297)
ロボット以前の問題として 普通に電動ドライバを人の手で握ってネジ締めした時 ネジ締めの反動トルクで振られて チョット気を緩めるとすぐにネジをナメてしまいますね で、本件では 電動ドライバを取り付けてるアルミプレートの剛性は計算したんでしょうぁ? 見た目ヘナヘナで電動ドライバの反動トルクで反ってしまいそうなんですけど? 大丈夫? 同様の事がロボット本体にも言える 右端のロボット支持点からドライバまでの総合剛性がちゃんと有れば良いのですが もし、剛性が足りなければネジは舐めてしまう http://www.iai-robot.co.jp/product/details/IX-NNN80__H/index.html https://www.yamaha-motor.co.jp/robot/lineup/ykxg/middle/ 昔の話ですが スカラロボットでなく、普通に直行ロボットでネジ締めやったとき 剛性不足に悩まされた 高剛性の両端支持タイプなら良かったんでしょうけれど http://www.iai-robot.co.jp/product/details/ICSB3_ICSPB3-GB_HS1_/index.html 安く挙げようと片持ち支持 http://www.iai-robot.co.jp/product/details/ICSB2_ICSPB2-BE_M/index.html 因みに私は制御設計であって機械設計ではないけれど ネジ締めがうまく出来ないのは制御屋がヘボだからと言われてしまった 剛性が足りないのを制御屋のせいにはしないようにね 制御屋が優秀なら剛性不足を回避してくれるかも知れないけれど
- hahaha8635
- ベストアンサー率22% (800/3609)
各1軸 ドライバー衷心より距離を出しモーメントを求めればいいんじゃないかという前に ブレーキ付きのがあれば計算しなくても終了
- TIGANS
- ベストアンサー率35% (244/680)
確かに計算上は最大30Nの力がかかりますが 力がかかるときにはドライバは舳固定されている状態になりますので そのジョイントには舳と平行な方向でのトルクしかかかりません。 ドライバ舳とロボットの舳が平行であれば30Nはあまり心配無いかと ただし固定部に近い回転舳に回転方向トルクが伝わることは忘れずに。 本図ではドライバの作用点とロボットの上下舳支持点がずれており ロボットの腕にねじりトルクがかかるので力学的に複雑化してしまい (なので担当ごとに言い方が変わっているのではないでしょうか) 傾斜舳が回転トルクでガタつくことになるかもしれません。 アルミプレートの形状を修正してドライバーのネジ締め付け時に ドライバ作用点とロボットの支持点の上下関係が少なくなるようにして ネジ締め付け時の反動トルクがロボット可動軸方向と垂直になるように 工夫されてみては?
- 中京区 桑原町(@l4330)
- ベストアンサー率22% (4373/19604)
30Nはドライバーを上に持ち上げる様に働くのですね。 その力はドライバーの重量を無くす方向に働きます。 普通に考えればドライバーの3kgf程度でしょう、30Nの力が上方向に働けばロボットから見れば負荷が無くなった様になりますね。 つまり30Nは無視して良い力です。
関連するQ&A
- 中空軸ギアヘッド出力軸許容慣性モーメントの求め方
いつも大変お世話になっております。表題にもある通り中空軸ギアヘッド出力軸許容慣性モーメントの求め方が知りたくご質問させていただきます。 添付のカタログには内部慣性モーメント0.0000367kg・m2(入力軸換算)は記載されておりますが出力軸許容慣性モーメントの記載がありません。 内部慣性モーメントとはどのようなものでしょうか? また、中空軸ギアヘッド出力軸許容モーメントを求める方法をご教示願います。
- 締切済み
- 機械設計
- ロボットの許容イナーシャの基準、無理やりやったら?
こんにちは。ロボットの選定で、可搬質量が一番大きいものを選定したのですが、 オフラインで質量設定をしたところ、「大きさ0」のときは当然、可搬質量内ですのでパスしたのですが、重心、つまり大きさを入れたところ負荷オーバーとでました。 モーメントオーバーか?と気づいて、イナーシャを計算したところ、やはり手首の許与イナーシャを2倍近くオーバーしていました。 ところで私は疑問に思ったのですが、「許容モーメント」というのは理解ができます。 しかし許容イナーシャというのは、いったい何の加速度を基準にしているのでしょうか。 すなわちトルク = イナーシャ×角加速度ですので、 角加速度が小さければイナーシャが大きくてよい、という理解なのですが。 モーター始動させるための最低限の加速度(それは仕様には書いていません)というものがあるんでしょうけど、 その最低限の加速度をもってしても、許容イナーシャを逸脱すると、許容トルクを超えてしまうということなのでしょうか? また、インターネットで検索すると、あきらかに私たちが取り扱う予定のワークよりもイナーシャが大きく、同質量の可搬を同じロボットでやってる例をみたのですが、 まともに負荷設定(イナーシャを含む)をするとアラームが出て怒られるはずなのですが、そういうのは負荷設定を甘くして、無理やりやっているのでしょうか? そういう場合はメーカーの保証対象外ですよね。 よろしくお願いします。
- ベストアンサー
- 民生用ロボット
- モーター選定について
いつもお世話になっております。 2軸のローラー間に円柱上のワークを載せまして、 一方のローラー軸をモーターで回転させ上に載せたワークを回転したいと考えています。 どのように計算を進めていけば良いのでしょうか? 私の方、ド素人の為計算する際はオリエンタルモーターカタログの選定例を参考にしているのですが、 ベルト駆動でもボールネジでもターンテーブルでも無い・・・ どうやって計算したら・・・と悩んでいました・・・ トルクの考え方、慣性モーメントの考え方、計算のプロセスとか出来るだけ細かく教えて頂ければ助かります。 どなたか御教授願えませんか?? cf. ワーク質量200kg,直径D:900mm,ローラー径:100mm
- 締切済み
- 機械設計
- サーボモータの慣性モーメントを計算する際、サーボモ
メーカーに聞いてもよくわからなかったので質問させていただきます。 サーボモータの慣性モーメントを計算する際、サーボモータ自体のロータ慣性モーメントは負荷として、計算しますか? http://imepic.jp/20210330/700810 ↑はキーエンスのサーボ選定ソフトの結果です。 この結果では、 サーボモータの許容慣性モーメント:1.57e-3 負荷慣性モーメント:1.442e-3 総合慣性モーメント:1.599e-3 (負荷慣性モーメント+ロータ慣性モーメント) 負荷慣性モーメント以上総合慣性モーメント以下で選定結果はokなので、負荷慣性モーメントを超えていればokということでしょうか? つまり、サーボモータ自体のロータ慣性モーメントは負荷として計算しないくてもいいということでしょうか? 宜しくお願いします。
- ベストアンサー
- 機械設計
- 慣性モーメント換算について
モーター軸換算の時に使う この式がどうして成り立つのかがどうしてもわかりません。 どなたかお教え願います。 どうぞ宜しくお願い致します。 Jm = J×(N / Nm)^2 但し、Jm:モータ軸換算慣性モーメント[kg・m^2] J :負荷軸慣性モーメント[kg・m^2] N:負荷軸回転数[1/min] Nm:モータ軸回転数[1/min]
- ベストアンサー
- 機械設計
- モーター選定
回転体重量590N 垂直軸にて120rpmで回すためのギヤードモーターの選定について確認お願いしたいです。モーター軸、回転体軸ともPCD100のVプーリーを取付け、Vベルトの連結にて回転させます。下記にて簡単に計算しました。(いろいろな条件を考慮するとこんなに簡単ではないでしょうが・・・) 回転に必要なトルク T = 590N x 0.05m=29.5Nm モーター出力 P = 2π/60 x 29.5Nm x 120rpm = 371w = 0.37kw 安全率2として モーター容量 0.75kw 減速比 1/10のギヤードモーターを選定しました。このモーターで回すことは可能でしょうか?わかる方おられましたら教えていただけませんか?宜しくお願いします。
- 締切済み
- 機械設計
- カム機構の設計に関して
カム機構の設計を始めて行うのですが、過去投稿も確認しましたが、いまいち理解できず質問させていただきます。 添付図に記載しましたが、楕円形のカムの中心に軸を通し、軸はモータにより駆動させ(カップリング接続)、カムの上部に位置する板を上下に昇降させる機構を考えています。 この時のモータ選定において、モータの必要トルクとカムの慣性モーメントの計算をどのように計算すればよいかわからず、ご教授いただけないでしょうか。 また、カムの形状がより複雑(異なるR部分が2~3箇所増える等)になる場合、計算方法はどのように変わるのでしょうか。 よろしくお願いします。
- 締切済み
- 機械設計
- サーボモータ駆動・ラック&ピニオン構造のロボット…
サーボモータ駆動・ラック&ピニオン構造のロボット用ハンドの検討 6軸多関節の産業用ロボットでプリント基板(A4サイズmax)や基板に装着する コネクタ(幅40?程)のハンドリングを検討していて、ハンドの設計に 関してご教授願いたく投稿いたしました。 要件は、ワークサイズ:40~300程度と広範囲の為 構造はラックをピニオンを対称に2コ配置した形でワークを挟み込む物にし ワーク質量:数グラム~300g程度なのでサーボモータ駆動でトルク制御し 剛性感の無い基板をやんわりと数百グラムの把持力で掴むことを考えています。 詳細 ラックはモジュール1、φ10の丸ラック、ピニオンはP.C.D 12 サーボモータは50w、軸径φ8がどうも最少の様ですのでこれを使用 定格0.15Nm、3,000rpmです。 この条件で考えると、ラック速度はゆっくりでよく50?/s程度でよいと考えますが ?心配なのがモータ1回転当たりラックは37?も進むので、減速機なしで使う場合、モータは超低速回転ということになります。 このような使い方はありなのでしょうか。 ?もう一つはトルク的に行けるかと思うのですが、慣性モーメント的には NGとなってしまうことです。(選定ソフトで) この件にお詳しい方いらっしゃいましたら、ご教授ねがいたくよろしくお願いいたします。
- ベストアンサー
- 機械設計

お礼
アドバイスありがとうございます。 ドライバーの作用点とロボットの支持点が上下方向にずれているのも ねじれ発生するので注意しなければならないことですね。 lumiheart さんの指摘にもありますが装置の剛性を注意しないといけないですね。 アドバイスありがとうございます。