搬送設計の典型的な条件とは?
- 普通の搬送設計における条件として、ワークの段替えができずCVの高さも変更できないことが挙げられます。
- また、CVの高さはワークAの搬送高さに設定され、ワークストッパでMGG25シリンダのストロークを規制してチャックすることも一般的です。
- 搬送時にはCVにMGG25の推力がダイレクトにかかるため、設計には注意が必要です。
- ベストアンサー
このような搬送は普通設計しますか?
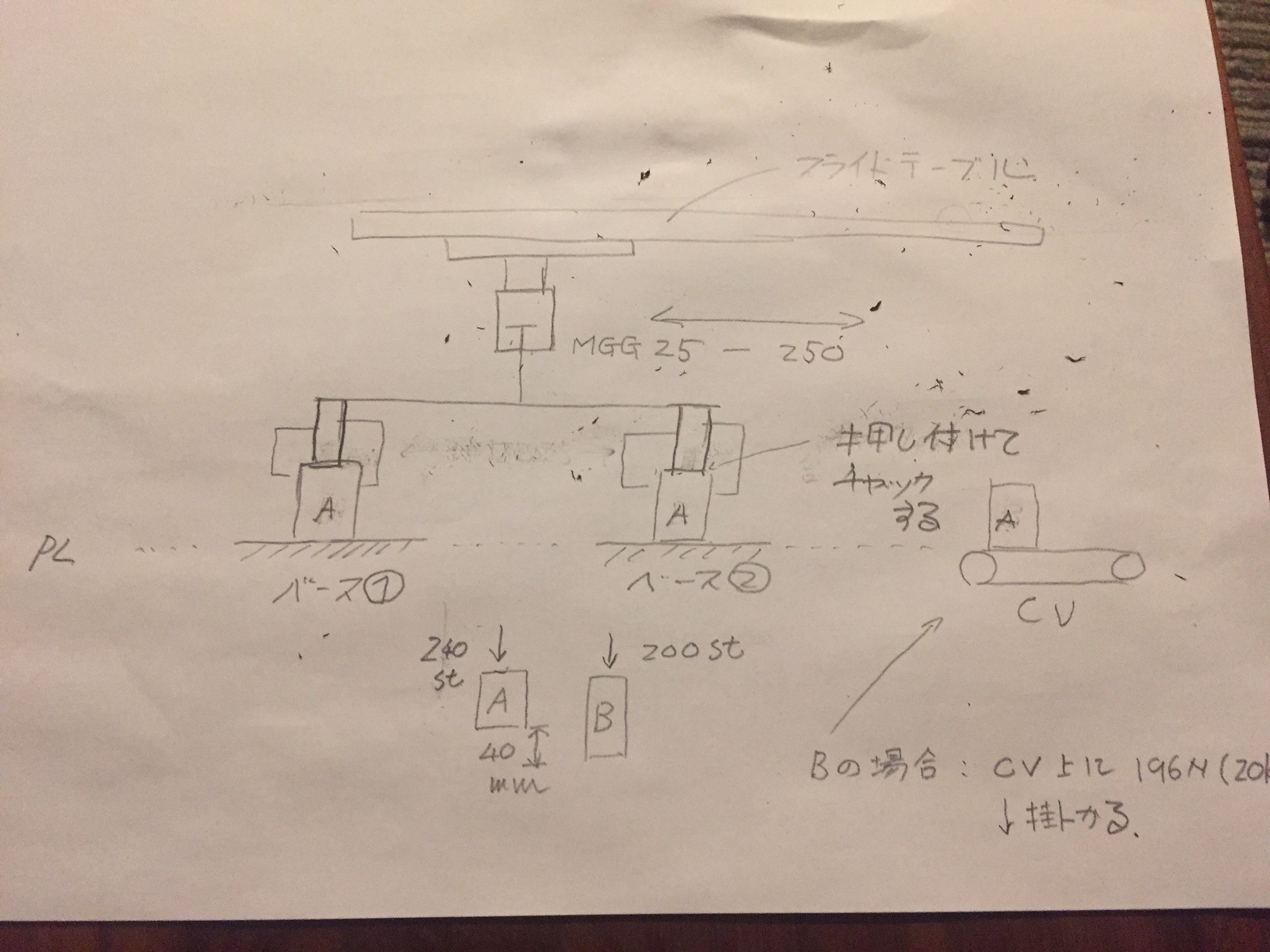
ご教示下さい。 写真のようにA Bと長さが40mm違うワークがあります。 そのワークを図のように搬送したいと思います。 スライドテーブルにMGG25-250のシリンダがついており、その先端にチャックシリンダーが2つ付いています。 ベース(1)からベース(2)へ、ベース(2)からベース(3)へと搬送します。 条件1.ベース(1)(2)はワークA、B毎に段替をしCVの高さは変更出来ません。(予算の関係上) 条件2.CVはワークAの搬送高さに設定。 条件3.ワークストッパでMGG25シリンダのストロークを規制し、チャックする。 ワークA=240ストローク ワークB=200ストローク この状態で、搬送するとき、CVにはMGG25の推力196N÷2=98Nがダイレクトにかかるわけですが・・・ このような設計は通常行いますか? コンベア壊れないのかなー?

- toshiyuki214
- お礼率2% (30/1396)
- 機械設計
- 回答数1
- ありがとう数1
- みんなの回答 (1)
- 専門家の回答
質問者が選んだベストアンサー
>コンベア壊れないのかなー? コンベア運転状態のままでシリンダを下降させて 98Nで加圧するんでしょうか? コンベアが壊れる心配よりもシリンダの方がひん曲がる心配した方が良いと思う コンベアは耐荷重何kg? http://www.okurayusoki.co.jp/product/conveyor/lightweight/belcon_mini/dmh.html これで定格荷重30kg以上
関連するQ&A
- エアーシリンダの位置決め(ストッパかストロークエ…
エアーシリンダの位置決め(ストッパかストロークエンドか) エアーシリンダを使用する、機械を設計中です。 シリンダ先端に、リンクバーを取り付け、その先端についている部品を 左右に、行ったり来たりさせます。 シリンダはφ63を空気圧5kg/cm2で使用予定で、ワークを動かすのに必要なシリンダ推力は、約105kgfです。 ワークの動くスピードは、片道1000mmくらいの距離を、4~5秒程度で動きます。 ←→ ___ | | | | |___| \ \ ____ ・-|____| その時、そのワークの止めるためにストッパを設けるか、シリンダのエンドで止まるようにするか迷っています。 ストッパで止めると、シリンダは常にストッパを押し続けている状態でシリンダによくないのかと思ったり、 または、ストロークエンドでワークを止めるようにすると、ワークが止まったときの、慣性で、シリンダに良くない負荷がかかったりするのではなど、どちらが良いのか、分からなくなっています。 一般的に、ストッパで止めるのか、シリンダのストロークエンドで止めるのか、どちらが良いのでしょうか? よろしくお願いいたします。
- ベストアンサー
- 機械設計
- フリーフローコンベアにおいてのストッパーシリンダ…
フリーフローコンベアにおいてのストッパーシリンダーの負担軽減方法 フリーフローコンベアでストッパーシリンダーと位置決めユニットを用いて、 パレットの搬送設備を設計していますが、サイクルタイム短縮でコンベアスピードをアップするとストッパーシリンダーが搬送パレットの衝撃荷重に耐えれなくて、ストッパーのアブソーバーが1年以内に壊れてしまいます。 ストッパーシリンダーのサイズアップしても、限界サイズまできました。 フリーフローコンベアで何か良いストッパーをする方法がありましたら、教えて欲しいです。 パレット重量は10kgで500mmを1秒間で搬送して位置決めまで行いたいと思っています。 コンベアでなくトランスファーにしないと駄目でしょうか?
- 締切済み
- 機械設計
- コンベヤストッパの強度計算について
コンベヤのストッパの強度計算についてお聞きしたい事があります。 一般的なコンベヤにワークをストップさせる為にストッパを設けたいと思っています。 条件 ワーク:50kg 搬送速度:6m/min この時の衝撃荷重はどのようにもとめたらいいのか教えてください。
- 締切済み
- 機械設計
- 自動機設計において
写真のような自動機を検討しています。 ガイド付シリンダの先端にチャックが各々ついており、A・Bのワークを隣のA'・B'の冶具ベースの上に搬送します。 その時、下記(1)~(4)についてご教示下さい。 (1)冶具の寸法公差、平面度 ワークチャックしたいのですが、ここは寸法公差が±0.03?±0.02?どのくらい にすれば良いのですか?平行度も必要ですか? (2)ベースの寸法公差、平行度 フレーム架台を上面をRz6.3できれいに加工させれおり、その上にベースを引こう と思います。その時、この板の上面と裏面を引こうと思いますが、 その時、この板 厚には寸法公差±0.??どのくらい必要ですか? 平行度も必要ですか? (3)直角度と表面粗さ LMガイドの取付面は、ミスミのカタログ(LMガイドブロック)を見ると平行度 0.02とうたわれており、これにちなんで直角度も0.02にしようと思います。 どのくらいが妥当なのでしょうか? (4)ガイド付シリンダが取付いている板 (4)の板厚寸法公差、平行度はどのように考えてたら良いのでしょうか? 全て、板厚公差、平行度、直角度についてどのように決めたら良いのか分かりません。弊社では今まで自動機を設計したこともなく参考図面がありません。 どうか、板厚やワークの大きさと言った細かい寸法は記載していませんが、 精々考え方だけでもご教示頂けないでしょうか? 何卒よろしくお願い致します。
- 締切済み
- 機械設計
- RB先端のマテハン部のチャック構造について
表記の件につきましてご教授頂きたく質問を投稿します ロボットの先端に(ロータリシリンダを介し)チャック シリンダを載せ、治具をチャックし搬送する設備を 製作したのですが、 チャック位置に対し搬送する治具の重量(含 重心位置ズレ)が 大きくチャックが開き気味になります チャックシリンダのサイズを上げたいのですがRBの可搬重量の 制限から厳しそうです (別の理由でロボット先端への負荷荷重がさらに上がりそう) チャック位置を重心に近づけたりしたいのですが、すでに 設備は出来上がっていてチャック位置を変更するスペースが ありません 外で構想・設計・製作してもらっているのですが、そこの 会社がBLオートテックのクイックチェンジなら円満解決と (https://www.bl-autotec.co.jp/FA/02qc/02top.html) 言うのですが見積もりが、クイックチェンジ35万円*2(設備 仕様上2ヶ使い)設計/加工品/購入品/組付け調整 一式130万円と言われ高額過ぎて別案(既製品)がないかと 思っています(涙 チャックする治具にはエアー等を送ったりする必要がなく 搬送するだけですのでクイックチェンジは勿体無いと思って おります -基本仕様- 【ロボット周り】 安川6軸RB,20kgタイプ ↓ SMCロータリシリンダ 2ヶ…A ↓ SMAチャックシリンダ 2ヶ…B (このチャックシリンダで事項の治具を搬送) 【搬送している(チャックする)治具】 150*200*t8アルミ+小物多数…C +ワーク重量…D A+B+C+Dで結構な重量になってしまっています どなたかアドバイスを頂けると幸いです
- ベストアンサー
- 機械設計
- ソレノイドストッパー機構
お世話になります。早速ですが質問をしたいと思います。ベルトコンベアによりワークを搬送していまして、ストッパーにてワークを定位置停止させたいと思っています。ストッパーは常に出た状態でワークを当てて止めます。ワーク停止にてコンベアも止めます。その後ストッパーをソレノイドにて抜きたいのですが、ワークの重さ3kgと惰性分の荷重がストッパーに掛かっているのでソレノイドの様な弱い力では抜くことが出来ません。なにかリンク機構の様なものでワーク荷重がソレノイドに掛かることなくストッパーを動作させることの出来るものはないか探しています。現場改造なので駆動はDC24Vのソレノイドと決まっています。どなたか良い智恵がありましたら教えて下さい。宜しくお願い致します。
- ベストアンサー
- 監視・センサ
- 穴あけ加工時にワークが動かないように固定する。
旋盤にワーク(s45c 円柱形)をくわえさせ右斜め上(60°)から穴あけ(ドリル径Φ8 )をする時、横方向にシリンダを置き、加工中にワークが動かないように、シリンダにストッパーを取付けて、ワークを押さえつけようと思います。この時に必要なシリンダの推力はどのくらいになるでしょうか?考え方や必要な式など教えて下さい。
- ベストアンサー
- 旋盤
- 油圧シリンダーの設計について
40N/mの推力を出せる油圧シリンダーを設計しなくてはなりませんが、 あまり詳しくないもので、よくわかりません。 この40N/mという力は、ナットをトルクレンチで締める力だそうですが、 これを油圧で押えたいということなのです。 シリンダーメーカーの選定ページも閲覧したのですが、 ほとんどの推力単位が受け圧面積m?でKNとしか出ておらず、 自信がないもので口径を決めれずにいます。 詳しい方がおられましたら、ご指導願えませんでしょうか。 よろしくお願いいたします。 質問が変でした。大変申し訳ありません。 要はM10ボルトを40N・mで締めたのと同じくらいの力で ワークを固定する場合の把持力といいますか 押える力を油圧シリンダーでということなのです。 失礼しました。
- ベストアンサー
- 機械設計
